BOSCH'S GIANT ROBOT CAN PUNCH WEEDS TO DEATH
At IROS 2015, researchers from a Bosch startup called Deepfield Robotics presented a paper on “Vision-Based High-Speed Manipulation for Robotic Ultra-Precise Weed Control,” which has like four distinct exciting-sounding phrases in it.
Given the scale of farming today, treating weeds chemically is really the only practical way for humans to keep them under control, because you can use tractors or airplanes to cover large areas in a short amount of time. But all of those necessarily deadly (to weeds) chemicals then get on the plants we don’t want to kill (because we want to eat them), as well as getting washed into the soil. The most organic and eco-friendly way of dealing with weeds is the old-fashioned way: physically removing them. “Physical removal” can mean pulling weeds out completely, but that involves both grasping the weed and doing something with it. A better solution is to just smash it way down into the ground, which is faster, easier, and something a robot can do excellently.
The stamping tool is 1 centimeter wide, and it drives weeds about 3 cm into the soil. It’s designed to detect (through leaf shape) and destroy small weeds that have just sprouted, although for larger weeds, it can hammer them multiple times in a row with a cycle time of under 100 ms. Testing on a real carrot crop, which has carrots spaced about 2 cm apart and an average of 20 weeds per meter growing very close to the carrots themselves, the robot had no trouble at all. The maximum capability of the system is about 1.75 weeds per second at a speed of 3.7 cm/s and a weed density of 43 weeds per meter, but at lower weed densities, the speed can be cranked up to 9 cm/s.
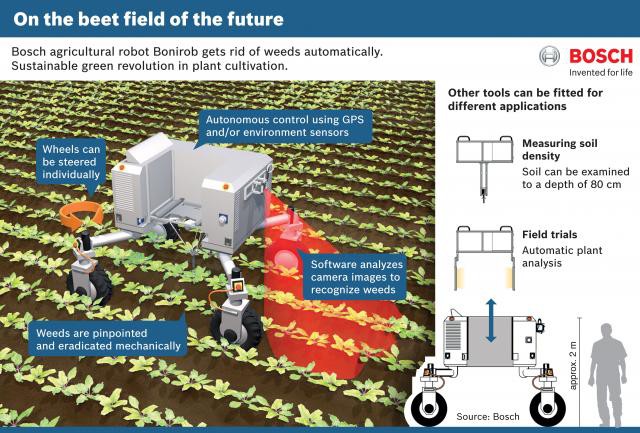
The robot in looks very much like a research project, but it’s intended to be a module that can be used on Deepfield’s “adaptable multi-purpose robotic platform,” BoniRob.
BoniRob can navigate itself, adapting to many different field configurations. Its modular payload bay can handle up to 150 kilograms of stuff, and an onboard generator lets it run autonomously for 24 hours without needing to refuel. It’s powered by ROS, and Deepfield even suggests that you could use it for crazy stuff like drone launches or even swarms of mini-BoniRobs.
The idea here is that farms could buy one BoniRob, and then buy or rent whatever modules they happened to need when they need them, without having to invest in many single-task robots. With Deepfield currently conducting extensive real-world tests with BoniRob operating autonomously on farms, we’re guessing that it’ll be available in the very near future.
“Vision-Based High-Speed Manipulation for Robotic Ultra-Precise Weed Control by Andreas Michaels,” by Andreas Michaels, Sebastian Haug, and Amos Albert from Bosch, was presented at IROS 2015 in Hamburg, Germany.
Article source by Evan Ackerman in IEEE Spectrum
http://goo.gl/3YPRSE
http://spectrum.ieee.org/automaton/robotics/industrial-robots/bosch-deepfield-robotics-weed-control